![双腿机器人在运行和跳跃时模仿人性平衡[视频]](http://www.jjchem.net/uploadfile/2021/0616/2021567517.jpg)
![两腿机器人模仿力反馈外骨骼套装中的人类操作员[视频]](http://www.jjchem.net/uploadfile/2021/0616/2021560181.jpg)

![新的MIT算法使机器人更快掌握[视频]](http://www.jjchem.net/uploadfile/2021/0616/2021559986.jpg)






所有平台仅提供服务对接功能,所载文章、数据仅供参考,股市有风险,投资需谨慎,用户需独立做出投资决策,风险自担!

时间:2022-01-07 17:58:00来源:
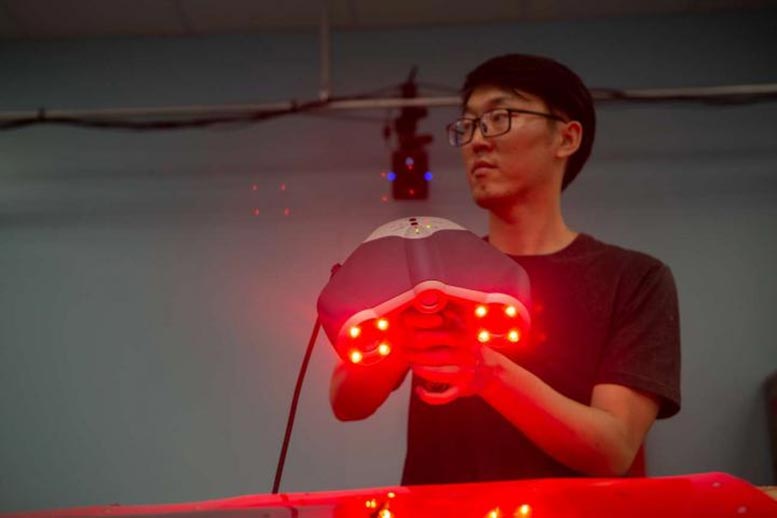
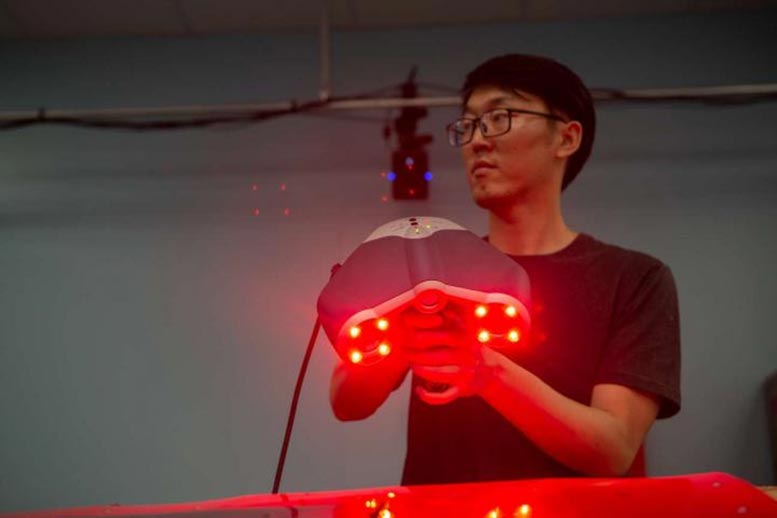
辛辛那提大学航空航天工程学生Yufeng Sun拥有一个用于测量和渲染三维物体的激光扫描仪。
当卫星休息时,令人惊讶地令人惊讶的是,你可以对他们做些什么。
它们变得昂贵且危险的浮子,多年或世代轨道地球,直到重力最终将它们吸引到大气中的火热死亡。
辛辛那提大学欧马教授是工程机器人技术,在他的智能机器人和自治系统实验室修复轨道卫星。他设想了可以与其他卫星码头进行维修或加油的机器人卫星。
该项目表明,UC在其战略方向上描述的研究的承诺,下次生活在这里。
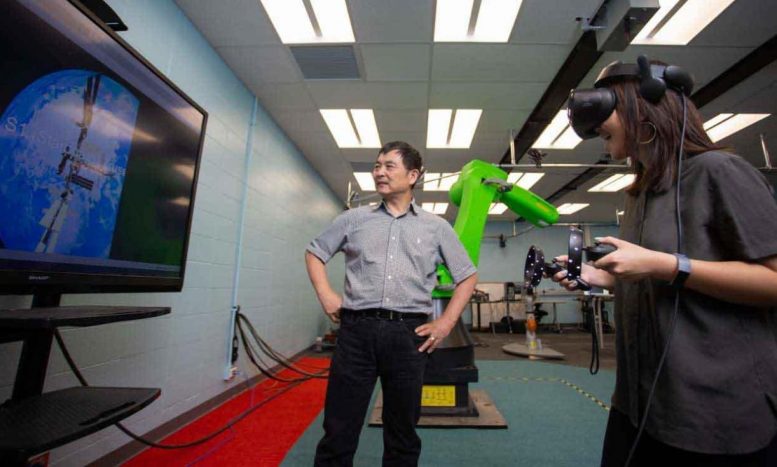
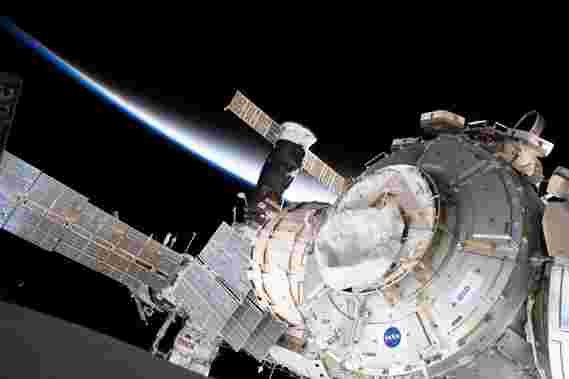
辛辛那提大学工程教授欧马和他的学生使用虚拟现实模拟器来检查国际空间站。
马马说,每件卫星发射都会出错。但对于大多数毛刺而言,一旦部署卫星就可以完成任何东西。
根据SpaceNews的说法,今年在达到高椭圆形轨道后,4亿美元的Intelsat卫星在今年的小型校车出现故障。今年SpaceX推出的前60颗Starlink卫星中的一些卫星也是故障的,但他们的低地地球轨道旨在在几年内腐烂到遗忘。
也许是1990年哈勃太空望远镜仅为美国航空航天局进行了翘曲时发生的最着名的卫星故障。随后的维修特派团在1993年的航天飞机努力的努力取代了镜子,以提供宇宙的惊人图像。
马马说,将人类送到卫星维修的空间是非常昂贵的。两个随后的哈勃服务特派团成本计算数十亿美元合并由航天飞机的宇航员进行。
卫星出现故障的卫星从日本到俄罗斯的大多数国际空间节目。问题不仅限于地球轨道。1999年,一个NASA轨道飞机撞到火星中,因为工程师使用磅而不是推进器软件中的公制牛顿。推进器的力量比预期的力量减少了四倍,而宇宙飞船的轨道严重低。
欧马智能机器人和自治系统实验室的学生机器人独立工作但合作地完成任务。
马马说,无能为力地修复卫星随着每次发射而变得更加紧迫。
“大商业卫星成本高昂。他们耗尽了燃料或故障或崩溃,“马马说。“他们希望能够在那里进行解决,但现在这是不可能的。”
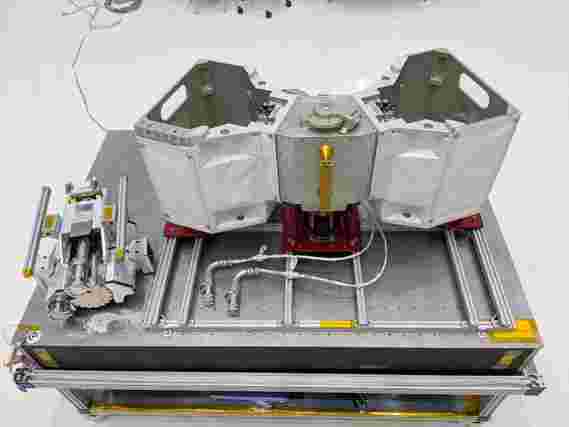
美国宇航局希望改变这一点。2022年,该机构将推出一种卫星,能够在低地轨道中加油其他卫星。目标是拦截和加油A.政府卫星。NASA说,预计称为RESTORE-L的项目有望为自主卫星维修提供概念证明。
一个名为Maxar的科罗拉多州公司正在为该项目提供航天器基础设施和机器人武器。

NASA的RESTORE-L使命的说明来推出可以在低地轨道中修理或促进其他卫星的卫星。
大多数卫星陷入废物,因为它们的燃料供应 - 不是来自严重的故障,这是Maxar的首席机器人的John Lymer表示。他说,单独加油将是一个为行业的福音。
“你正在退休一个完美的卫星,因为它耗尽了天然气,”他说。
Lymer表示,他熟悉MA在他的智能机器人和自治系统实验室工作。
“欧马,我曾多年合作过度,涉及聚会和近距离组织。那里有各种技术解决方案。有些人会比其他人更好。它是关于获得运营体验,找出谁的算法更好,最低减少操作风险。“
Lymer表示,该行业准备起飞,为UC的航空工程学生创造一个福音。
“我认为这是未来。我们要爬进它 - 不是跳跃,“他说。
在MA的实验室中,学生正在研究自动导航,卫星需要在太空中与其他卫星停靠。这是棘手的业务,因为零重力的无意中凸起可以发送一个或两个车辆翻滚。
“在太空中摔倒很容易,因为没有任何东西可以抓住它。然后卫星变得更加难以抓住。如果它开始翻滚,它可以基本上腾出。它不会自行停止,“马说。

辛辛那提大学欧马教授在他的实验室里穿着虚拟现实护目镜。MA正在努力解决卫星的基础技术,以修复太空中的其他卫星。
他说,工程模拟可以预测目标卫星的动态行为,因此可以安全地逮捕卫星。
“我们有仿真工具,所以我们可以准确地预测其行为,”他说。
“抓住太空中的东西真的很难。并抓住空间翻滚的东西更加困难,“马说。“你必须非常小心预测动态行为并执行精确的控制,以便您能够”脱掉“卫星并轻轻抓住它。”
马达比较了远程卫星导航到最新的无人驾驶汽车技术。在他的实验室中,学生使用鞋盒大小的机器人来测试这些算法,这些算法在外观上移动时看起来像空中曲棍球表。但是它是提供像微型气垫船的空气缓冲的机器人,以模仿空间的微匍匐环境。
“一旦这项技术被证明,美国宇航局或商业公司将把它带到下一步。” - 欧马,UC航空航天工程教授
博士候选人Andrew Barth解释了它是如何工作的。
“现在它只是一个测试台基本上。它有一个范围传感器,相机和惯性测量单元,你无法看到下面,“他说。“它与执行器和八个方向推进器一起移动,以将其推向桌面上。”
Barth表示,虽然它被限制在x和y轴上移动,导航概念可以应用于三维维度。
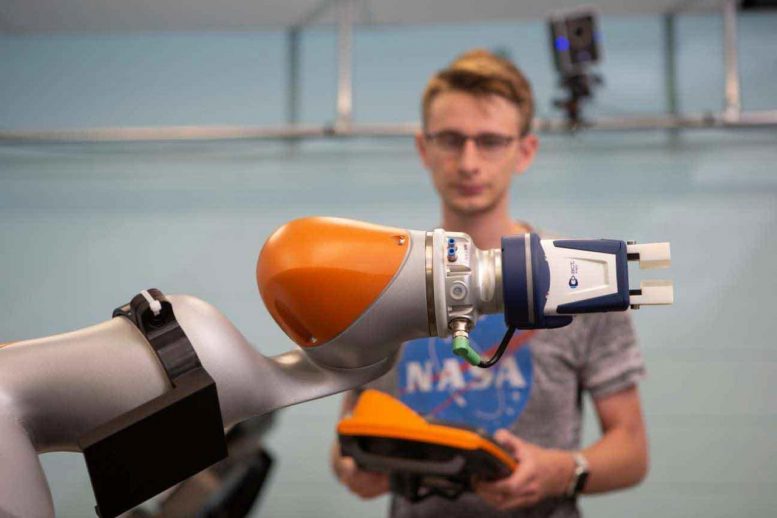
MA也在努力卫星进行遥控器所需的复杂机器人。他的实验室有几种工业大小的机器人臂,具有七个关节,给他们提供全方位的运动。
马马说,最有用的维修卫星将能够完成多个任务。在他的职业生涯中,他曾在乘坐国际空间站和以前的航天飞机节目中致力于与机器人武器有关的各种项目。他的签名在船站上的一块设备上漂浮在轨道上。

欧马智能机器人和自治系统实验室的学生正在获得独立工作,但与其他机器人合作以完成任务。
“这个机器人将对算法和传感器技术进行一些控制测试,”马来说,指向他实验室的人类大小的机器人手臂。“我们没有模拟特定的任务,而是测试的新技术,可以在未来的任务中使用。”
在他的实验室中,MA和UC高级研究助理Anoop Sathyan正在开发机器人网络,可以独立工作,而是对共同任务合作。
为他们的最新学习,MA和Sathyan将一组机器人用一个新颖的游戏将一组机器人带到测试中,这些游戏使用弦可以将附加的令牌移动到桌子上的指定点。由于机器人每个控制只有一个字符串,因此他们需要其他机器人的合作,通过响应每个机器人的动作而通过增加或松弛张力来将令牌移动到正确的位置。
使用称为遗传模糊逻辑的人工智能,研究人员能够获得三个机器人,然后是五个机器人移动研究人员想要的令牌。
他们的结果本月在jourcortobotica中发表。
研究人员发现,通过使用五个机器人,即使其中一个机器人发生故障,集体也可以完成任务。
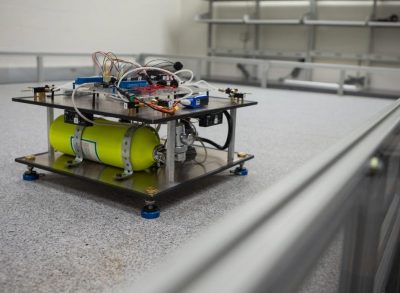
OU MA的实验室的机器人气垫船有助于学生在空间中学习自主导航。
“这对史式机器人的责任较低的机器人的问题尤其如此,”研究人员得出结论。
母马对他的大部分职业生涯都有持久的空间兴趣。在新墨西哥州州立大学,他设计了一种模仿低重力的机械线束。穿着线束的学生可以在跑步机上“月亮弹跳”,踏上地球的重力或在篮球轮辋上制作天空扣篮。
Ma表示,由于较高的失败成本,在空间中的固定卫星正在成为航空航天行业的优先事项。
“它还不太实用。这项技术仍在开发出来,“马说。“但我想象在五十年代技术成熟时,他们将开始将其商业化以外出并修复卫星。”
美国国防高级研究项目机构的前计划经理Gordon Roesler告诉天文杂志,无力修复或修改卫星一旦出发,就没有经济意义。
“没有其他[榜样]在那里,我们建立了价值的一些数亿美元或十亿美元,而且再也看不到了,”他说。

辛辛那提大学航空航天工程学生在机器人气垫船上工作,漂浮在空气的垫子上。缺乏摩擦有助于太空中的模仿条件。
公司将不得不考虑远程维修或服务的卫星。今天的大多数卫星都太脆弱了,甚至在没有冒险的情况下远程掌握。
“即使你想,今天也无法提供许多卫星。学生巴特说,新卫星将需要进入门以适应基本维修和对接目标来帮助解决方法。
时间就是生命。随着每次发射和每一个失败的卫星,低地球轨道即将接近凯斯勒效果,该理论由唐纳德凯斯勒认为卫星碰撞可能会造成碎片的级联,妨碍了未来发射的安全,如虚构2013奥斯卡获奖薄膜“重力”所示。 “
“想想这些物体的速度。我们不是在谈论公路速度甚至飞机速度。他们在17,000英里/小时上旅行,“马说。
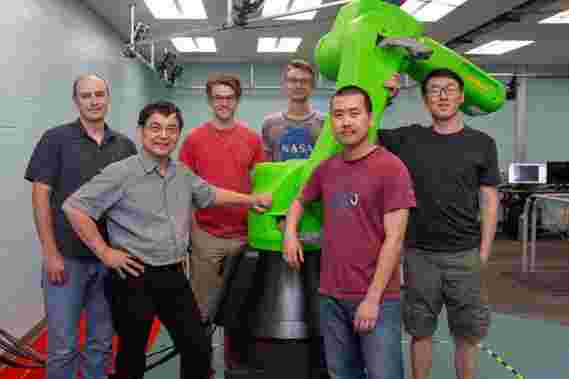
辛辛那提大学工程教授欧马及其学生正在努力在实验室中致力于智能机器人和自主空间导航。
Ma表示,空间是政府机构为探索和发现目的主导的领域。但该领域是在商业化的尖端,这承诺为想要追求它们的毕业生的大量航空航天工程工作。
“最终,空间的商业化将是一个大行业,”他说。
他的研究有助于推动将为未来空间项目铺平道路的知识前沿。
“我们并没有发展整个任务。我们正在开发潜在技术,“马据说。“一旦这项技术被证明,美国宇航局或商业公司将把它带到下一步。”
在一所大学,尼尔阿姆斯特朗曾担任航空航天工程教授,第一步可以是大的。
参考:Anoop Sathyan和Ou Ma,2019年4月15日,罗伊加斯,罗伊加西,“使用遗传模糊系统的多个机器人协作控制”
10.1017 / S0263574719000353
声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。




图文推荐
2022-01-07 17:58:00

2022-01-07 16:58:00

2022-01-07 15:58:00

2022-01-07 14:58:00
![科学家们使用X射线和红外线探索埃及木乃伊骨骼[视频]](http://www.jjchem.net/uploadfile/2021/0616/2021569947.jpg)
2022-01-07 13:58:00

2022-01-07 12:58:00
热点排行
精彩文章

2022-01-07 16:58:01
2022-01-07 15:58:02

2022-01-07 14:58:02
2022-01-07 13:58:02
2022-01-07 12:58:02
2022-01-07 11:58:09
热门推荐
