





所有平台仅提供服务对接功能,所载文章、数据仅供参考,股市有风险,投资需谨慎,用户需独立做出投资决策,风险自担!

时间:2021-12-06 14:58:06来源:

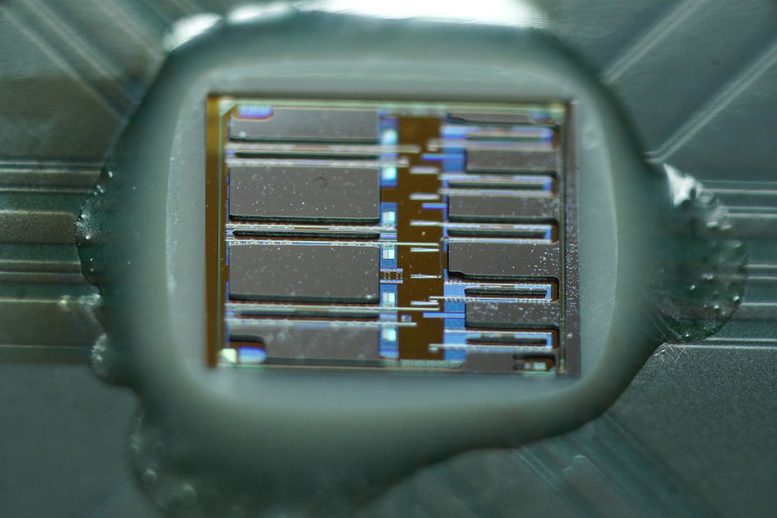
一台新的计算机芯片,小于美国的DIME并以季度显示为尺度,有助于微型无人机在飞行中导航。图片由研究人员提供。
MIT的研究人员,去年设计了一个针对帮助蜜蜂尺寸的无人机的微小电脑芯片设计,现在在尺寸和功耗中进一步缩小了芯片设计。
该团队由Vivienne Sze联合主导,麻省理工学院电气工程与计算机科学部(EEC)副教授,以及1948年职业发展副教授的1948年职业发展助理教授的Sertac Karaman,建于地面完全定制的芯片UP,重点是降低功耗和尺寸,同时增加了处理速度。
新的电脑芯片,名为“Navion”的新电脑芯片,他们本周在VLSI技术和电路研讨会上展示,只是乐高小型占地面积的20平方毫米 - 并且仅消耗24毫瓦的电力,或约1千分之一的能量为电灯泡供电。
使用这种微小功率,芯片能够在每秒高达171帧的实时摄像机图像中处理,以及惯性测量,其中它用于确定其在空间中的位置。研究人员表示,该芯片可以集成到像指甲中的“纳米纳摩”一样,以帮助车辆导航,特别是在全球定位卫星数据不可用的远程或无法访问的地方。
芯片设计也可以在任何需要在有限的电源上长时间导航的小型机器人或设备上运行。
“我可以想象将这个芯片应用于低能量机器人,如扑击翼车,或者像天气气球的较轻的车辆,那么在一个电池上必须走几个月,”卡拉曼说是MIT信息和决策系统和数据,系统和社会研究所的实验室成员。“或想象医疗设备就像你吞下的小药丸一样,可以以非常小的电池智能化的方式导航,因此它不会过热。我们建造的芯片可以帮助所有这些。“
SZE和Karaman的共同作者是EECS研究生AMR Suleiman,谁是领先作者; EECS研究生Zhengdong Zhang;和Luca Carlone是该项目的研究科学家,现在是麻省理工学院航空航天部门助理教授。
一个灵活的芯片
在过去的几年里,多个研究组拥有较小的微型无人机,足以适合手掌。科学家们设想这种微小的车辆可以在掌握在手掌上落后的地方,如蚊子大小的摄影师或测量师,他们可以轻松储存。
但是,一种棕榈尺寸的无人机只能携带这么多的电池电量,其中大部分用于使其电机飞行,为其他基本操作(例如导航),以及特别是状态估计,或机器人的能力,留下很少的能量确定它在太空中的位置。
“在传统的机器人中,我们采取现有的现有计算机并在它们上实现[国家估计]算法,因为我们通常不必担心功耗,”卡拉曼说。“但在需要我们缩小低功耗应用的每个项目中,我们现在必须以非常不同的方式思考编程的挑战。”
在他们以前的工作中,Sze和Karaman开始通过在单个芯片中结合算法和硬件来解决这些问题。它们的初始设计在现场可编程门阵列或FPGA上实现,该商业硬件平台可以被突出到给定的应用程序。与通常需要10到30瓦的较大的标准无人机相比,芯片能够使用2瓦功率执行状态估计,该标准无人机能够执行相同的任务。尽管如此,芯片的功耗大于微型无人机通常可以携带的功率总量,研究人员估计为约100毫瓦。
为了进一步缩小芯片,在尺寸和功耗中,该团队决定从地下构建芯片而不是重新调败现有的设计。“这给了我们在芯片的设计中更具灵活性,”Sze说。
跑在世界上
为了降低芯片的功耗,该组提出了一种设计,以最小化相机图像形式的数据量和惯性测量 - 在任何给定时间存储在芯片上。该设计还优化了这些数据流过芯片的方式。
“我们将暂时存储在芯片上的任何图像,我们实际上压缩了,所以需要更少的内存,”Sze说,谁是MIT研究实验室的成员。该团队还削减了外来的操作,例如零计算,这导致零。研究人员发现了一种方法来跳过涉及数据中任何零的计算步骤。“这允许我们避免不得不处理和存储所有这些零,因此我们可以缩短许多不必要的存储和计算周期,这降低了芯片尺寸和功率,并提高了芯片的处理速度,”Sze说。
通过他们的设计,团队能够将芯片的内存从其之前的2兆字节减少到约0.8兆字节。该团队在先前收集的芯片上测试了通过多种环境(如Office和Warehouse Spaces)的无人机生成的数据集。
“虽然我们定制了低功耗和高速处理的芯片,但我们也使其充分灵活,以便它可以适应这些不同的环境以获得额外的节能,”Sze说。“关键是在灵活性和效率之间找到平衡。”芯片还可以重新计算以支持不同的摄像机和惯性测量单元(IMU)传感器。
从这些测试中,研究人员发现他们能够将芯片的功耗从2瓦到24毫瓦下降到24毫瓦,这足以为芯片为每秒171帧的图像供电 - 一个甚至更快的速率投影数据集。
该团队计划通过在微型赛车上实施其芯片来展示其设计。虽然屏幕显示了船上摄像头的实时视频,但研究人员也希望在实时显示它在空间中的芯片确定,以及它用于执行此任务的权力量。最终,团队计划在实际无人机上测试芯片,最终在微型无人机上。
部分由科学研究的空军办公室和国家科学基金会支持这项研究。
纸:Navion:一种完全集成的节能视觉惯性径向型纳米无人驾驶自主导航
声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。





图文推荐
2021-12-06 14:58:03

2021-12-06 13:58:03
2021-12-06 12:58:03
2021-12-06 11:58:02
2021-12-06 10:58:02
2021-12-06 09:58:03
热点排行
精彩文章

2021-12-06 14:58:04
2021-12-06 13:58:05
2021-12-06 12:58:05

2021-12-06 11:58:04

2021-12-06 10:58:04
2021-12-06 09:58:05
热门推荐
