







所有平台仅提供服务对接功能,所载文章、数据仅供参考,股市有风险,投资需谨慎,用户需独立做出投资决策,风险自担!

时间:2021-12-03 08:58:07来源:

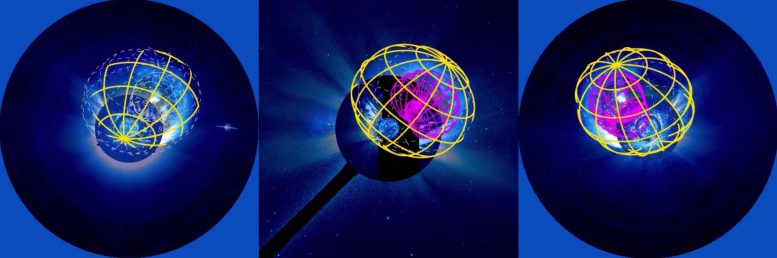
WHOI和MIT研究人员部署了一个自主水下车辆以测试新的导航和传感算法。图像:MSEAS.
观察世界的海洋越来越多地是分配给自治水下车辆(AUV)的使命 - 船用机器人设计用于漂移,驱动或滑过海洋,没有人类运营商的任何实时输入。AUV可以帮助回答的关键问题是在最具信息丰富的数据中何时何地,以及何时何地进行清晰地进行最佳地达到采样位置。
麻省理工学院工程师现在已经开发出数学方程系统,这些方程式预测用于给定观察特派团的最佳信息的数据,以及到达采样网站的最佳方式。
通过其方法,研究人员可以预测某个变量的程度,例如某些位置处的海洋电流的速度,揭示了关于一些其他变量的信息,例如一些其他位置的温度 - 称为“相互信息”的量。如果两个变量之间的相互信息的程度很高,则可以编程AUV以转到某些位置以测量一个变量,以获得关于另一个的信息。
该团队使用了他们开发的等式和海洋模型,称为多学科仿真,估计和同化系统(MSEAS),以成功预测相互信息和指导实际AUV的领域。
“并非所有数据都相同,”麻省理工学院机械工程系的研究生Arkopal Dutt说。“我们…的标准允许自主机器定位传感器位置和采样时间可以进行最佳信息测量。”
为了确定如何安全有效地达到理想的抽样目的地,研究人员通过预测“可达性前沿” - 通过预测AUV的动态三维区域来帮助AUV使用不确定的海洋活动的方法来帮助AUV达到一定时间内,鉴于AUV的功率限制和海洋电流。该团队的方法使车辆能够将其带到其目的地的冲浪电流,并避免将其丢弃的轨道。
当研究人员与观察阿拉伯海地区的实际AUV航线进行了比较了他们的可达性预测时,他们发现他们的预测匹配车辆在长时间导航的地方。
最终,该团队的方法应该有助于车辆以智能,节能的方式探索海洋。
“自主海洋机器人是我们的侦察员,冒着汹涌的海洋收集我们的数据,”机械工程研究生Deepak Subramani说。“我们的数学方程可以帮助侦察员达到所需的位置,并通过智能地使用海洋电流来降低能源使用。”
由Pierre Lermusiax领导的研究人员,机械工程和海洋科学和工程教授,在MIT的工程教授,很快就奠定了他们的成绩,以便在海洋海军杂志上发表的“海洋”的书系列中出现了一卷。研究。
除了DURT和SUBRAMANI外,Lermusiaux的团队还包括Jing Lin,Chinmay Kulkarni,Abhinav Gupta,Tapovan Lolla,Patrick Haley,Wael Hajj Ali,Chris Mirabito和Sudip Jana,都来自机械工程系。
寻求最具信息丰富的数据
为了验证他们的方法,研究人员表明,他们可以成功预测最丰富地实现各种目标的测量。例如,它们预测了测试科学假设的最佳观察,如果海洋模型方程本身是正确的,并且估计海洋生态系统的参数,以及检测海洋中相干结构的存在。他们证实,他们的最佳观察比平均观察更具信息量为50至150%。
要达到最佳观察位置,AUV必须浏览海洋。传统上,机器人的规划路径已经在相对静态的环境中完成。但是,通过海洋计划是一个不同的故事,因为强大的电流和漩涡可以不断变化,不确定,并将车辆从其预先预定的课程中推迟。
因此,麻省理工学院团队从与海洋的基本原则开发了路径规划算法。它们修改了现有的等式,称为Hamilton-Jacobi方程,以确定AUV的可达性前沿,或者在给定的时间内保证车辆的最远的周边。该等式基于三个主要变量:时间,车辆的特定推进约束和平流,或通过动态海洋电流的运输 - 该组通过使用其MSEAS海洋模型预测的变量。
通过新系统,AUV可以将最可行的道路映射到最可行的路径,并根据不确定的海洋电流随时间转移时调整他们的抽样计划。在第一个大型开放式海洋测试中,团队计算了概率可达性前线以及印度洋中的自主浮游物和滑翔机的最具信息丰富的路径,作为北阿拉伯海流通 - 自治研究(NASCAR)倡议的一部分海军研究(ONR)。
在几个月内,研究人员,努力解决他们的麻省理工学院办公室,为ONR团队提供了日常可达性预测,以帮助引导水下车辆,沿途收集最佳观察。
“它基本上没有太多睡觉,”Lermusiaux召回。“预测是三到七天,我们将每天吸收数据和更新。我们做得很好。平均而言,滑翔机和浮子最终在我们预测的概率区域内结束。“
真相的一刻回报了
Lermusiaux和他的同事还利用了他们的系统来规划“最佳路径” - 鉴于预测海洋当前条件,在最短的时间内将获得AUV到某个位置的轨迹。
与麻省理工学院林肯实验室和伍兹孔海洋学机构的同事,他们通过在玛莎葡萄园的海岸之间持有“比赛”来实时测试了这些时间最佳的路径。在每场比赛中,一个AUV的课程由团队的最佳路径决定,而另一个AUV遵循与同一目的地最短的路径。
“这是紧张的 - 谁会赢?”Subramani回忆起。“在与数学方程和证据的所有多年的理论发展中,这是我们的真理的时刻。”
团队的工作得到了回报。在每场比赛中,团队预测下的AUV首先达到目的地,比竞争的AUV更快地表现大约15%。该团队的预测帮助获胜AUV避免强大的电流,有时旨在阻止其他AUV。
“这太神奇了,”Kulkarni说。“即使在物理上,两条路径分开只不到一英里,我们的预测仍然在我们的预测上发挥了高达15%的旅行时间。它表明我们的路径真的是最佳的。“
作为其他应用程序,作为麻省理工学院技术和设计中心的成员,将申请他的海洋预测方法,以帮助指导印度海岸的观察,其中车辆将受到监测渔业,以提供可能低的渔业成本管理系统。
“AUV不是很快,他们的自主权不是无限的,所以你真的必须考虑到电流和他们的不确定性,并严格地模范事情,”Lermusiaux说。“这些自治系统的机器智能来自严格导出和合并控制理论,信息理论和机器学习的控制差分方程和原则。”
这项研究部分由海军研究办公室,麻省理工学院林肯实验室,麻省理工学院塔塔中心和国家科学基金会提供资金。
出版物:Pierre F.J.Lermusiaux等,“自主和拉格朗日平台和传感器的最佳规划和抽样预测,”2018年海洋学,“ DOI:10.5670 / Oceanog.2017.242
纸:2个智能自主海洋观测系统的未来
声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。





图文推荐

2021-12-03 08:58:02
2021-12-02 19:58:02

2021-12-02 18:58:02
2021-12-02 17:58:03
2021-12-02 16:58:02
2021-12-02 15:58:02
热点排行
精彩文章

2021-12-03 08:58:04
2021-12-02 19:58:04

2021-12-02 18:58:04

2021-12-02 17:58:05
2021-12-02 16:58:04
2021-12-02 15:58:04
热门推荐
