






所有平台仅提供服务对接功能,所载文章、数据仅供参考,股市有风险,投资需谨慎,用户需独立做出投资决策,风险自担!

时间:2021-11-28 17:58:07来源:
从桌上拿起笔并用它写字可能对您来说似乎很容易,但这对机器人来说可不是一件容易的事。
一方面,一旦拿起笔,就必须将其移到手中以使其处于书写位置。前副研究员亚当·斯皮尔斯(Adam Spiers)说:“您将笔从最初的握力移动到更稳定的位置,但是要这样做,是用手指的某些表面握住它,并使它在手指的其他表面上滑动。”在亚伦·多尔(Aaron Dollar)的实验室中。“就所有力和摩擦相互作用而言,这确实非常复杂,但我们所有人都认为这是一件很简单的事情。”
因此,Dollar的实验室尝试了一种更简单的定位方法,该方法着重于手指表面摩擦力的变化。他们的结果最近发表在IEEE机器人与自动化快报上,并将很快在国际智能机器人与系统会议(IROS 2018)上发表。
斯派尔斯说:“我认为人们经常忽略的人类手的关键特征之一就是手指的表面特性,这使我们能够做的事情甚至达到了在手内移动物体的程度。”“例如,当您用指尖轻轻触摸时,它们就能在物体上滑动,而用力稍大会使软的内部组织变形并使它们紧握。”
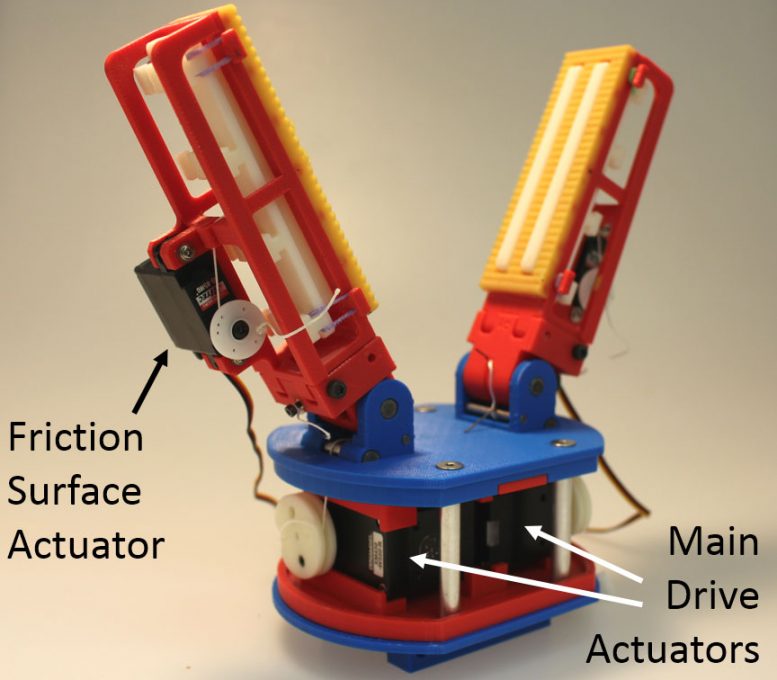
新开发的“可变摩擦”机器人手指结合了一个由软质聚氨酯制成的表面(高表面摩擦力),一个由3D打印的硬质塑料制成的表面(低表面摩擦力)和一些橡皮筋,使一个表面悬浮在另一个表面之后。这些机械手指中的两个彼此面对,以形成机械手,每个机械手指的底部都有通过电动机移动的枢轴关节,从而可以用多种方式控制手指。在低抓力下,氨基甲酸酯充当指垫,但在更大的力下会切换到由丙烯腈丁二烯苯乙烯(ABS)制成的坚硬表面。
“我们可以得到一些非常有趣的行为,我们可以在抓住物体的同时在手中移动它们,”现在是马克斯·普朗克智能系统研究所的研究科学家Spiers说。“可以使对象在手指上上下滑动,也可以使对象在手指之间滚动。然后,我们实际上可以将这些动作组合起来,以在手的工作空间中的任何位置重新定位对象。”
有点像人的手,但不完全是。
他说:“从大自然中汲取灵感,可是要说的很多,但不要复制太多。”“用人的手指可以使您获得很好的行为,但它也与真正强大的大脑息息相关。”
斯派尔斯说,人们可以毫不费力地执行复杂任务的直观方式的起源尚不清楚。是因为我们拥有精巧的大脑可以通过复杂的操作来控制身体,还是因为我们的手指具有能够改变表面摩擦力的结构?
他说,无论哪种情况,他都试图用机器人设备复制最终结果。这是一个概念证明,因此它仍然无法执行人手执行的一些更细微的任务,但是他们已经将设计开源,以便其他研究人员可以扩展它并提高其灵活性。 。
他说:“这是一个新的平台,其他人现在可以在此平台上建立并实施人类不费吹灰之力但机器人难以应对的那些更困难但又常见的行为。”
出版物:Adam J. Spiers等人,“可变摩擦手指表面可通过抓握和滑动实现手内操纵”,IEEE,2018年; DOI:10.1109 / LRA.2018.2856398
声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。




图文推荐
2021-11-28 17:58:02
2021-11-28 16:58:03

2021-11-28 15:58:02
2021-11-28 13:58:03

2021-11-28 12:58:03

2021-11-28 11:58:02
热点排行
精彩文章
2021-11-28 17:58:04
2021-11-28 16:58:05

2021-11-28 15:58:04
2021-11-28 14:58:32
2021-11-28 12:58:04

2021-11-28 11:58:04
热门推荐
